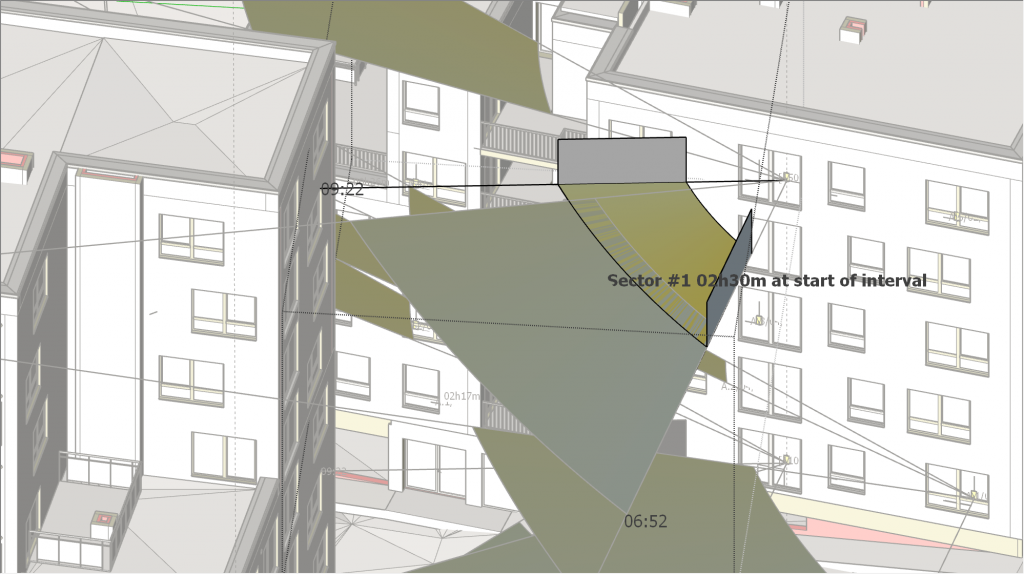
The “required insolation’ sector is added to support in-model decision on the limiting volumes and conditions.
This is not a public software, so please contact the author of the LSS Arch Tools for more questions.
Feb 25
The “required insolation’ sector is added to support in-model decision on the limiting volumes and conditions.
This is not a public software, so please contact the author of the LSS Arch Tools for more questions.
We have a computer room in our local university, ind it’s quite bussy. The main problem it became (this is another story) too long to be usable and there was a strong demand for the screencast view right on the student’s workplace. Yes we do use beamers, but the view was too small to dead the text on the screen.
And so the project was born. There is single seat where the view originates and multiple locations where it should be visible. The system must be easily expandable and upgradeable, no vendor lock-ins. All the points in the systems should be easily adjustable and replaceable.
Read the rest of this entry »Apr 7
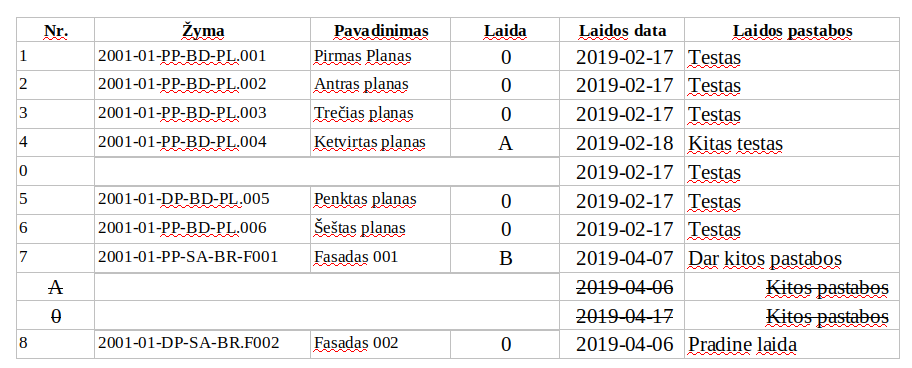
I’m working oh hobby project on a free time, and one of the tasks here is to generate ODT file, containing output from the database. The output library i’ve chosen is PHP-ODT. It’s kind of basic, but allows to create ODT documents on the fly.
| This code will create corrupt file, according to LibreOffice: | The correct code is: |
|---|---|
|
|
Not in the base code yet
$pStyleDate = new ParagraphStyle(‘revDate’);
…
$pStyleDateStrike = new ParagraphStyle(‘revDate-strike’);
$pStyleDateStrike->setAsChild(‘revDate’);
Again, not in the base code yet:
$pStyleDateStrike->setLineThrough(StyleConstants::SINGLE);
Well, not in the base code and horizontally only:
|
 |
Substrate
Captured with ‘$ sleep 120 ; xwd -root -out full-screen.xwd‘
The belt is B45MXL – MXL (0.08″) pitch, 45 -teeth, 10 mm width.
It will cost around $15 per 10 pack on if you know the pitch and length, or starting $15 for a single one, if you buy it as “KS 230 replacement belt”, part number 27006/57.
Dec 5
Okay guys, the log if filling with
sshd[20117]: Invalid user pi from 142.93.118.186 port 50416 sshd[20117]: input_userauth_request: invalid user pi [preauth] sshd[20117]: Received disconnect from 142.93.118.186 port 50416:11: Bye Bye [preauth] sshd[20117]: Disconnected from 142.93.118.186 port 50416 [preauth] sshd[20119]: Invalid user cubie from 5.189.227.161 port 39772 sshd[20119]: input_userauth_request: invalid user cubie [preauth] sshd[20119]: Received disconnect from 5.189.227.161 port 39772:11: Bye Bye [preauth] sshd[20119]: Disconnected from 5.189.227.161 port 39772 [preauth] sshd[20121]: Invalid user guest from 208.68.37.169 port 42858
Nov 25
So, here it comes. I need a small, pretty looking PCB for the infrared switcher.
It took 3 hours to validate the order, almost 25 hours to make the PCBs and almost 2 days to announce them delivery ready.
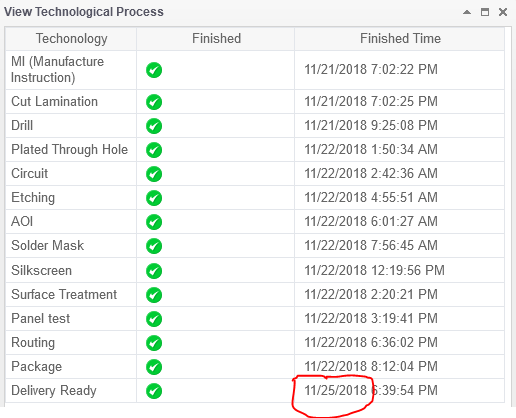
To be continued, once they arrive 🙂
Sometimes I find myself in awkward situations.
Some time ago we have installed a video duplication system in one of auditoriums. It is based on the HDMI backbone and some active equipment, like splitters and media converters.
It has single video injection point, where different sources can be selected. Source switching is made using KD-S4X1 switch from Key Digital.
One small problem is the entire installation must be concealed, while the switch is controlled with a button on the case and the IR remote. It has also no means of displaying the output, except a LED per active channel.
And so the Project was born: place a push button anywhere and replay the sequence on the IR LED inside the enclosure. Just to be sure, an Read the rest of this entry »

Unimat SL/DB grinding arbor. Photo from the Internet
Arbor’s lenght 18 + grinding tool + 3 + 5.2 (bolt head) mm. Thread length on bolt 13,2 mm, M12x1.
Thread on the arbor M12x1, continuous, last 5 mm toward the headstock are bored to ~14 mm.
Holder diameter 15 mm, holder lip 3 mm. Max diameter 28mm.
Feb 17
Mkay, let’s switch from Arduino IDE to some more user friendly.
I need Arduino, PHP, Python and i woukl like to switch to STM32 ‘Blue pill” instead of AVR core.
Seems like Eclipse community has developed some support on Arduino: need to mention Sloeber to bringing more pleasant UX to Arduino community. STM32duino community has an nice wiki post on installing Sloeber on Eclipse, yet it’s not up to date right now:
Right now i have some older Arduino sketches that I would like to port to STM32: I like the on-board USB, increased pin count and the idea of J-Link debugger.